
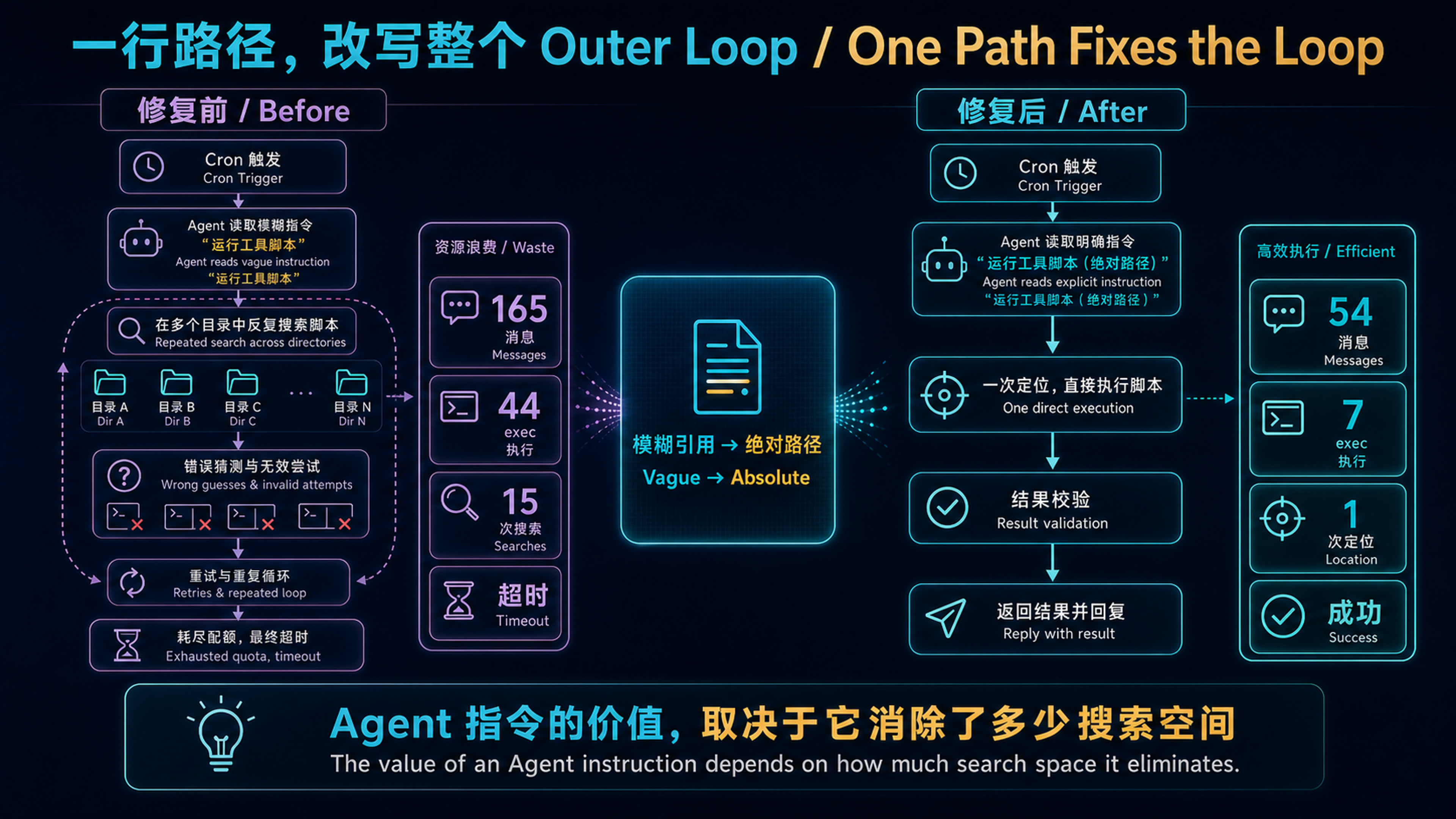
这张前后对比图先给出事故的完整因果链。左侧不是模型“笨”,而是模糊指令迫使它反复探索目录;右侧的一行绝对路径直接缩小了动作空间,因此消息数、搜索次数和执行调用同时下降。
现象:定时任务连续超时#
OpenClaw 有一个每天 21:05 执行的 cron job——daily-ai-news,功能是抓取当日 AI 领域新闻、生成摘要、配一张 banner 图、发到飞书群。
某天我注意到这个任务连续失败。看日志:
20 分钟超时,消耗了 280 万 input token。一个日报任务。
排障:从日志反推 Agent 行为#
OpenClaw 的 cron 执行会留完整的对话日志。我拉出最近一次失败的日志,统计关键指标:
| 指标 | 失败运行 |
|---|---|
| 总消息数 | 165 |
| exec 工具调用 | 44 次 |
| tool_result 总大小 | 1,122 KB |
| 运行时间 | 1200s+(超时) |
165 条消息?44 次 exec?一个"抓新闻 → 写摘要 → 生图 → 发飞书"的流程,正常情况下不该超过 60 条消息和 10 次工具调用。
逐条翻日志,发现了罪魁祸首。
根因:Agent 不知道工具在哪#
daily-ai-news 的 SKILL.md(skill 的指令文件)里有一行:
| |
就这么一句。没有路径,没有调用方式,没有参数。
Agent 拿到这个指令后,它知道要调用 create-img,但不知道这个东西在哪。于是它开始搜索:
| |
15 次 exec 调用,只是为了找到一个工具的位置和调用方式。
更要命的是,这个搜索过程产生的 tool_result 体积巨大——每次 find、grep、ls 的输出都会被塞进对话上下文。44 次 exec 调用累计产出 1.1MB 的工具结果,直接把上下文撑爆,触发 compaction,进一步拖慢执行。
恶性循环#
这是一个经典的上下文膨胀恶性循环:
没错——compaction 压缩掉的恰恰是 Agent 好不容易搜到的工具路径,于是下一轮它又从头搜。这就是 165 条消息的来源:Agent 至少做了 2-3 轮完整的"搜索 → 找到 → 被压缩 → 再搜"循环。
修复:一行绝对路径#
修复方法极其简单。在 ai-news-digest 的 SKILL.md 末尾加一段,告诉 Agent 工具的完整调用方式:
create-img 调用方式(直接使用,不要搜索)
- 先读取 skill 规范:
/home/openclaw/.openclaw/plugin-skills/create-img/SKILL.md- 调用脚本(命令见下方)
- 生成后用
lark-cli im images create --file <图片路径>上传飞书取得image_key
| |
就这些。给 Agent 一个可以直接复制粘贴的完整命令,包括:
- Python 解释器的绝对路径(虚拟环境的)
- 脚本的绝对路径
- 所有必要参数
- 输出目录
修复效果#
修复后的第一次运行:
| 指标 | 修复前 | 修复后 | 变化 |
|---|---|---|---|
| 总消息数 | 165 | 54 | -67% |
| exec 工具调用 | 44 | 7 | -84% |
| tool_result 大小 | 1,122 KB | 204 KB | -82% |
| 运行时间 | 1200s+(超时) | 317s | 从超时到 5 分钟完成 |
消息数砍掉三分之二,exec 调用砍掉 84%,工具结果体积砍掉 82%。
一行路径,比任何算法调优都管用。
为什么这个问题这么隐蔽#
这个 bug 有三个让它难以发现的特征:
1. 不是每次都失败#
如果 Agent 第一轮搜索就找到了工具路径,且没有触发 compaction,任务就能正常完成——只是慢一点。只有当上下文刚好在搜索过程中触及 compaction 阈值时,才会进入恶性循环。这意味着它是一个概率性超时,不是确定性失败,让排障方向很容易跑偏到"是不是上游 API 慢了"。
2. Agent 的搜索行为看起来很"合理"#
翻日志时,Agent 的每一步操作都是合理的:不知道路径 → 搜索文件系统 → 读文件确认 → 检查环境。这是一个"聪明但低效"的行为模式。你不会觉得 Agent 做错了什么,只是觉得"怎么这么慢"。
3. SKILL.md 的"模糊引用"不会报错#
写 使用 create-img 生成图片 这种指令,从语法上完全合法——SKILL.md 没有类型检查,不会告诉你"create-img 路径未解析"。Agent 接到指令后也不会说"我找不到 create-img"然后停下来——它会自己去找。这种静默降级到搜索模式是最难发现的问题。
深层教训:给 AI Agent 写指令的原则#
这个 bug 让我意识到一个更基本的问题:我们给 AI Agent 写的指令,精度要求远高于给人写的文档。
给人 vs 给 Agent#
给人写文档时,你可以写"使用 create-img 生成图片"——人类开发者会去问同事、搜 wiki、翻目录结构,这些探索行为的成本几乎为零(不消耗 token,不占上下文)。
给 Agent 写指令时,同样的模糊引用触发的探索行为每一步都有成本:
- 每次
find/grep消耗一次工具调用 - 每个工具结果占用上下文空间
- 上下文膨胀触发 compaction
- compaction 可能丢掉已经找到的信息
Agent 的"好奇心"是有代价的,而且代价按上下文空间计算。
SKILL.md 写作规则#
基于这次教训,我给自己定了几条 SKILL.md 的写作规则:
1. 所有外部工具引用必须包含绝对路径。 不是"使用 create-img",而是 /home/openclaw/.openclaw/plugin-skills/create-img/scripts/omniroute_image_batch.py。宁可 SKILL.md 多 5 行,也不要让 Agent 搜索。
2. 可执行命令必须可直接复制。 包括解释器路径、虚拟环境激活、所有参数。Agent 应该能直接把命令粘贴到 exec 里执行,不需要任何额外的路径解析。
3. 明确写"不要搜索"。 在提供完整路径的同时,显式告诉 Agent"直接使用以下路径,不要搜索文件系统"。这看起来多余,但 Agent 有时会"验证"你给的路径是否存在——一句"不要搜索"能省掉这个验证步骤。
4. 环境依赖写死。 Python 虚拟环境路径、Node.js 版本、需要 source 的配置文件——全部写死。不要假设 Agent 知道运行环境。
一个类比#
这很像写 Dockerfile 和写 README 的区别:
- README(给人看):“先安装 Python 3.14,然后在虚拟环境里 pip install -r requirements.txt”
- Dockerfile(给机器跑):
RUN /usr/local/bin/python3.14 -m venv /app/.venv && /app/.venv/bin/pip install -r /app/requirements.txt
SKILL.md 是给 Agent 执行的指令,不是给人阅读的文档。它的精度要求更接近 Dockerfile,而不是 README。
更广的视角:Outer Loop 的性能瓶颈在哪#
回顾这个系列的三篇文章,有一个清晰的模式:
| 问题 | 根因 | 修复 |
|---|---|---|
| Compaction 静默吞回复 | harness 的压缩策略没有保护关键信息 | 加 safety margin + 结构化 prompt |
| 向量搜索挂了没人发现 | 配置缺失导致静默降级 | 补 embedding provider 配置 |
| Cron job 超时 | SKILL.md 缺路径导致搜索膨胀 | 加一行绝对路径 |
三个问题的共同特征:都不是模型能力的问题,都是 Outer Loop 的配置/指令精度不够。
这验证了第一篇的核心论点:在 harness 时代,系统质量的瓶颈从来不在模型推理,而在模型之外的一切——上下文管理、工具调用规范、指令精度、降级路径、监控告警。
一行路径省掉 84% 的工具调用,一个 embedding provider 配置让向量检索复活,一个 safety margin 参数防止 compaction 吞回复。这些修复没有一个需要换更强的模型——它们需要的是更好的 harness 维护。
当你的 Agent 表现不好时,先别想着换模型。打开日志,数一数工具调用次数,看看上下文是怎么膨胀的。答案大概率在 SKILL.md 的某一行里。
这是 OpenClaw 生产实战系列的第三篇。如果你也在运维 AI Agent 的 cron job,希望这个"一行路径"的教训能帮你少走弯路。系列会持续更新——下一个话题可能是 Agent 的工具调用成本控制和上下文预算管理。